

Eine vollständig browserbasierte Offline-Programmierung mit RoboDK ermöglicht Anwendern die virtuelle Inbetriebnahme von Maschinen, Anlagen und Robotern ohne Installation zusätzlicher Software. Steuerungslogiken, Pfadbewegungen sowie Greiferwechsel lassen sich schon in der Planungsphase simulieren und optimieren. Früh erkannte Kollisionen und Ineffizienzen reduzieren Stillstandszeiten und senken Projektkosten beträchtlich. Eine kostenfreie Webversion erlaubt unkomplizierte Machbarkeitsstudien. Minimaler Aufwand. Die im CoRo-Labor der ETS University in Montreal entwickelte Anwendung wird von mehr als 50.000 internationalen Nutzern geschätzt.
Inhaltsverzeichnis: Das erwartet Sie in diesem Artikel
Frühe Validierung von Steuerungslogiken und Bewegungsabläufen vor physischer Installation
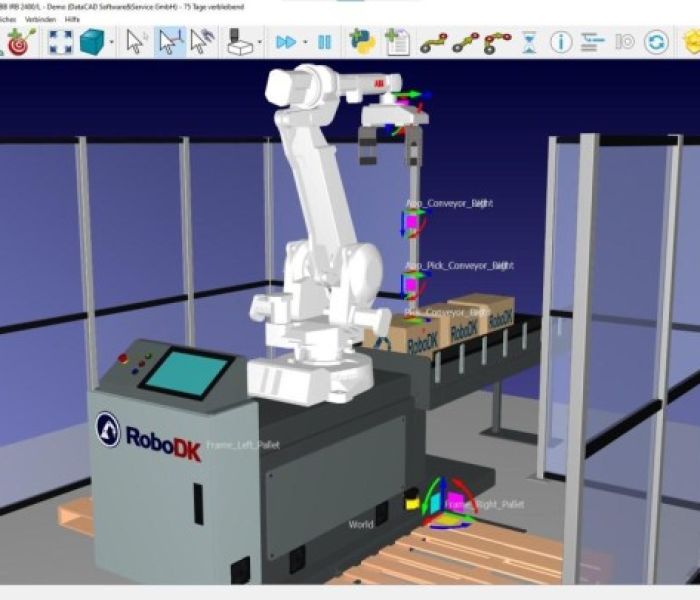
Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
Ein digitaler Inbetriebnahmeprozess nutzt virtuelle Modelle, um mechanische, elektrische und softwarebasierte Komponenten zusammenzuführen und in Echtzeit zu testen. Hierbei generiert die Steuerungssoftware vorgegebene Bewegungsabläufe, die mittels Simulation auf Kollisionen, Taktzeitabweichungen oder Programmfehler untersucht werden. Kostenaufwändige Anpassungen während der physischen Installation entfallen dadurch weitgehend. Projektteams erhalten ausführliche Protokolle zur Validierung, können Optimierungen umsetzen und erreichen so eine schnellere Serienfreigabe mit höherer Anlageneffizienz. Simulationsdaten liefern wichtige Kennzahlen zur Prozessoptimierung und Risikominimierung deutlich.
Frühe virtuelle Validierung hilft Abhängigkeiten aufbrechen und Aufwand vermeiden
Hohe Personalkosten, zunehmende Automatisierungsanforderungen und komplexe Anlagenkonzepte erfordern eine durchgängige Prozessoptimierung. Virtuelle Inbetriebnahme ermöglicht die digitale Prüfung von Steuerungsprogrammen, Sicherheitszonen und Kinematiken, bevor Maschinen vor Ort installiert werden. Diese digitale Vorgehensweise reduziert Stillstandszeiten während der Inbetriebnahme, minimiert Fehlerquellen in der Konfiguration und fördert transparente Abstimmungsprozesse zwischen Planung, Inbetriebnahme und Betrieb. Dadurch lassen sich Projektlaufzeiten verkürzen und Investitionen effizienter nutzen. Gleichzeitig stärkt es die Wettbewerbsfähigkeit, indem Qualitätssicherung und Ressourceneinsatz optimiert werden.
Nahtlose Übernahme optimierter Roboterprogramme von Simulation in reale Steuerung

Effizient sparen mit RoboDK in der virtuellen Inbetriebnahme (Foto: DataCAD Software und Service GmbH)
Die Offline-Programmierung mit RoboDK erlaubt die präzise Parametrierung von Robotern unterschiedlicher Hersteller in einer rein virtuellen Umgebung. Anwender definieren Greiferwechsel und simultane Bewegungsabläufe realistischer Kinematiken, optimieren diese und übertragen die Programme ohne manuelle Anpassungen auf die echte Anlage. Mit Unterstützung von über 1.200 Roboterarmen aus 80+ Marken können Tests unabhängig von Produktionslinien durchgeführt werden. Dadurch sinken Implementierungsrisiken, Projektlaufzeiten verkürzen sich und die Betriebskosten reduzieren sich langfristig spürbar, effizient und dauerhaft.
Effiziente Bahnoptimierung im Voraus vermeidet Nacharbeiten und verlängerte Projektlaufzeiten
Durch den Einsatz von RoboDK profitieren Unternehmen von einer realistischen, virtuellen Inbetriebnahme, bei der Roboterprogramme digital getestet werden, ohne kritisch auf die physische Produktionslinie angewiesen zu sein. Bereits in der Konstruktionsphase lassen sich Kollisionen, Engpässe und suboptimale Trajektorien identifizieren und beheben. Damit sinken Stillstandszeiten, Nacharbeiten werden minimiert und Inbetriebnahmen erfolgen planbar und effizient. Die resultierende höhere Anlagenverfügbarkeit und die verkürzten Projektlaufzeiten führen zu spürbaren Kosteneinsparungen. Zusätzlich ermöglicht die virtuelle Validierung eine bessere Abstimmung zwischen mechanischer Auslegung und Steuerungssoftware.
Mehrroboter-Setups amortisieren RoboDK-Investition durch spürbare verkürzte Inbetriebnahmezeiten und Nacharbeiten
Viele Fertigungsbetriebe berichten von einer signifikanten Einsparung an Zeit und Ressourcen, weil die virtuelle Inbetriebnahme mit RoboDK die Testläufe in realitätsnahen Simulationen ermöglicht. Insbesondere bei komplexen Anlagen mit mehreren Robotern lassen sich potenzielle Fehlerquellen und ineffiziente Bewegungsabläufe schon im Vorfeld identifizieren und beseitigen. Die digitale Absicherung der Steuerungsprogramme führt zu verkürzten Projektphasen, weniger Unterbrechungen in der Produktion und einer frühen Amortisation der getätigten Softwareinvestition. Frühe Planungssicherheit erhöht die Effizienz dauerhaft.
Browserbasierte RoboDK Webversion vereinfacht Offline-Programmierung und Simulation ohne Softwareinstallation
Durch die kostenlose RoboDK Webversion entfällt der Installationsaufwand für Softwarepakete, sodass Anwender direkt vom Browser aus Simulationsszenarien anlegen und Programme erstellen können. Die übersichtlich gestaltete Benutzeroberfläche unterstützt bei der Auswahl von Robotermodellen, Greifern und Pfaden. In wenigen Schritten lassen sich Bewegungsabläufe anpassen und Kollisionstests durchführen. Insbesondere Einsteiger profitieren von vorgefertigten Vorlagen und Tooltips, die den Einstieg erleichtern und den Workflow beschleunigen. Gleichzeitig ermöglicht die Browserlösung standortunabhängiges Arbeiten und Kollaboration in Echtzeit.
Unterstützt STEP, IGES, G-Code, APT und weitere 3D-Modelldateien problemlos
Mit der browsergestützten Version lassen sich diverse CAD- und CAM-Datenformate wie STEP, IGES, G-Code oder APT sowie weitere Industriestandards importieren und bearbeiten. Durch die direkte Verbindung zur Desktop-Applikation RoboDK Professional können Projekte per Mausklick übertragen werden, um dort auf umfangreiche Bearbeitungs- und Optimierungsfunktionen zuzugreifen. Dies beschleunigt den Entwicklungsprozess, erhöht die Planungsgenauigkeit und reduziert das Risiko von Inkompatibilitäten zwischen den virtuellen Simulationen und der realen Steuerung sowie effizientere Produktionsabläufe ermöglichen nachhaltig.
Permanentlizenz ab 3.995 Euro inklusive Dokumentation Trainingskonzept und Support
Die RoboDK-Permanentlizenz ab 3.995 ? erlaubt die Offline-Programmierung beliebig vieler Roboter unabhängig von Hersteller und Modell. Über 50.000 Anwender in mehr als 50 Ländern nutzen weltweit die Plattform für Simulation, Optimierung und Inbetriebnahme. Das Paket enthält eine umfangreiche Online-Dokumentation, fundierte Trainingsunterlagen und einen klar strukturierten Fünf-Schritte-Plan zum schnellen Einstieg. RoboDK läuft nativ auf Windows, macOS und Ubuntu, ist stabil kompatibel mit Raspberry Pi und bietet mobile Apps für Android sowie iOS-Geräte.
Anfangs 200 Roboter unterstützt, heute weltweite Nutzung durch Konzerne
Im Januar 2015 entstand unter der Leitung von Albert Nubiola im CoRo-Labor der ETS University in Montreal die erste Version von RoboDK. Anfangs unterstützte die Software etwa zweihundert Roboter verschiedener Hersteller und ermöglichte die Simulation und Offline-Programmierung. Durch stetige Erweiterungen deckt RoboDK heute mehr als 1.200 Modelle von über 80 Herstellern ab. Die Plattform wird weltweit von Forschungsteams, Start-ups und großen Industrieunternehmen gleichermaßen für Automatisierungsaufgaben eingesetzt.
Virtuelle Inbetriebnahme mit RoboDK beschleunigt die Vorbereitung und Optimierung von Roboteranwendungen, indem sie vollständige Systemsimulation erlaubt. Programmierer können Bewegungsprofile, Steuerungsabläufe und Werkstückinteraktionen realitätsnah überprüfen, bevor Hardware verfügbar ist. Dadurch reduzieren sich Ausfallzeiten in der realen Produktion, und Risiken durch Fehlfunktionen sinken erheblich. Unternehmen erzielen Einsparungen bei Personal, Material und Ersatzteilen. Die kostenlose Webversion macht den Zugang zur Offline-Programmierung einfach und flexibel, sodass Innovationen schneller in die Praxis überführt werden können.











